| 送交者: 董小骚很OK[♂★★骚年一呼百应★★♂] 于 2022-10-26 22:51 已读 1442 次 1 赞 | 董小骚很OK的个人频道 |
这个问题是一个深坑。但是在现代量子力学的观点中,大约多数人认为观察是不需要意识介入的。
在回答这个问题之前,我们先要知道,什么行为可以看作是一种“观察”?
在裸量子力学(不附加诠释)中,“观察”是最基本的概念,它是不可约的,也就是不可以进一步解释的。任性地说,观察就是观察。只有在“观察”这个基础概念之上,我们才可以进行量子力学的计算,如果我们想对“观察”本身说些什么,基本上就需要跳出量子力学了,这也就是诸多诠释的分歧点的核心。
玻尔和海森堡对观察的看法,以其模糊不清著称,他们认为观察是在经典事物介入量子过程时,在量子-经典边界发生的(Heisenburg Cut),或曰“被不可逆地记录在经典存储器中”;
冯诺依曼认为,观察是意识的介入;
维格纳认为,观察就是意识中获得的关于系统的印象;
爱因斯坦、薛定谔、德布罗意等人认为,量子力学之所以无法解释观察,是因为它是一个表象理论,而不是本质理论 - 存在着某种尚未被理论涵盖的隐变量,这些隐变量才是物理真实,不因观察而改变。
那么,在玻尔和海森堡看来,猪和蚂蚁都是经典事物,它们肯定可以使波函数“坍缩”。
在冯诺依曼和魏格纳看来,猪或蚂蚁能不能坍缩波函数,取决于它们有没有意识。
在爱因斯坦等人看来,存在着独立于观察者的物理真实,量子力学暂时无法对它做出描述,不代表没有更本质的隐变量理论可以完成这个任务。
应该说,这些早期的大佬们的看法,虽然有其历史意义,但是随着现代量子力学的发展,人们的观念正在超越他们。
那么,什么是“观察”呢?
6park.com 直观讲,我们可以做出这样的假设:观察应至少具有如下两个特征:
假设1:观察伴随着信息的传递。如果没有任何获取信息的可能,一个行为当然就不能被称为观察。
假设2:信息的传递过程可以被某种物理过程描述,任何非物理过程都非必要。
那么,从第一个特征来看,所谓“信息的传递”,就是系统的某些性质与观察者形成关联(correlation)。当一个观察者对系统完成了一个观察的时候,它获得了关于系统可观测量的信息(即使是它没有“意识到”这种信息)。也就是说,我们此时通过与观察者的交互,观察者可以“告知”我们系统关于该可观测量的信息。(比如说,我们以某种方式去“询问”那头猪,可以得到猪的观察结果)。对于系统S,以及一个观察仪器A,A对S做出了某种观察,其结果就是,我们可以通过A的某些性质,推知S的某些性质 – 因为A“知道”了S的这些性质。
从第二个性质来看,观察的全部有意义效应,(至少在原则上)都可以用一个物理过程描述。即观察是一个物理过程而不是非物理过程。因而观察者就不必然是一种“意识”的拥有者,它可以是一个有意识的主体,也可以是一个无意识的仪器,甚至是任意的某种物理系统。观察,就是系统与观察者的某种“相互作用”。
那么,从这两个特征联合起来看,观察就是系统与观察者的某种共同物理演化,其结果导致两者之间的性质关联。我们可以进一步假设,这种演化满足薛定谔方程:
假设3:观察过程可以被薛定谔方程描述。
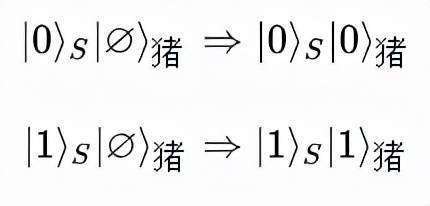
从这三个假设出发,我们就可以对观察做出分析了。比如说,S是一个双态系统,对应着它的两个态,“猪”(基于假设2,我们就可以把猪看做是一台仪器)也有两个相应的记忆状态 - 请注意,这里的记忆态指的是一种物理状态,也就是猪脑的某种神经激发态(如果是仪器,可以是数据硬盘的两个状态)。在发生观察之前,猪的状态是“无知”。发生了观察之后,它的状态就变成了“知道”。为方便计,我们把猪的“无知”状态记做 ,把“知道系统状态为1”的状态记做1,把“知道系统状态为0”的状态记做0。如果系统一开始处于某种本征态,那么猪的观察不会改变系统的状态,而相应地猪的记忆中就会产生对系统认知的对应状态。
根据我们的假设3,观察过程满足薛定谔方程,那么对于s的任意状态:
根据薛定谔方程的线性演化:
我们可以看到,系统和猪共同演化形成了纠缠态。
对猪而言,当它完成了一个观察,必然会导致它的猪脑的状态相应发生了变化。如果猪脑的两个记忆态可以明确区分,那么每个记忆态就明确对应着一个系统的状态,那么这个观察结果就很清楚地被记忆下来了。我们就可以根据猪脑的状态推知系统的状态(你可以想象成猪产生了清晰的认知印象)
反之,如果猪的两个记忆态完全重叠,那么我们无法区分这猪脑态,因而观察就没有有效的结果(你可以想象成猪产生了完全混乱的印象)。
请注意,为了生动表达,我这里比较不严谨地用了“猪脑”、“印象”这样的措辞。其实这不意味着猪需要有意识。我们完全可以把猪想象成一台仪器,猪脑就是一个仪表盘,仪表盘的指针可以偏向于0和1两个刻度,来指示系统的两个状态。如果两个刻度偏离很大,并且指针也很稳定,那么我们很容易判断出它到底偏向哪一个刻度(“猪脑”清晰的认知印象),这就是一个完美测量。但是,如果指针偏离程度很小,并且还在不停地在颤动。那么我们就会犯嘀咕:因为我们不太容易看出指针到底指向哪一个刻度,此时就很容易发生误读,这就是一个不完美测量。极端情况下,指针的偏离很小但是颤动很大,于是读数完全被颤动淹没掉了,那么我们就完全无法区分它到底偏向哪一边,此时它就完全“重叠”在一起,那么此时,仪表完全无法获取系统的任何信息 – 此时观察就失败了。
无效测量
完美测量
我们知道,S和猪之间的纠缠程度,可以通过计算它们的共有信息(mutual information)来判断。
其中,这里面的信息是用冯诺依曼熵表示的。S或猪的信息,是我们在复合系统中抛弃(trace out)另一方得到的信息量。共有信息的解读之一就是,当我们知道猪的状态时,能够得到S状态的信息多少 – 用大白话说,就是猪可以“告诉”我们关于S状态的信息量是多少。
简化起见,我们令:
很容易我们可以得知:
我们可以看到,当猪可以明确分辨观察结果的时候,也就是
的时候,猪和系统形成最大纠缠,上述共有信息最大,具体为一个比特(ln2)。而猪完全无法分辨观察结果的时候,也就是
的时候,猪和系统之间就没有任何纠缠,上述共有信息就变成了0。
也就是说,当猪与系统形成最大纠缠的时候,它就从系统获得了最多的信息,(也就是说,S的两个状态和猪的两个可辨的状态完全关联。当我们知道猪为0态,我们就有100%的概率知道S也为0态,反之亦然。这种观察是完全确定的,并且是完全准确的。)就完成了一次“完美观察”。反之,如果它们不形成任何纠缠,猪也就无法从系统获得信息,这就是一次无效观察。
当然,观察也可以不那么“完美”但仍然能获得一些信息,此时:
也就是说猪与S形成部分纠缠,与S的两个状态相关联的猪的两个状态不完全可辨。此时就是一次部分观察。
用大白话说,猪和系统形成多大的纠缠,猪就可以“告诉”我们多少关于S状态的信息。
一般科普读物上会强调纠缠的非定域性,但是在观察过程中,纠缠的最大特性就是不可分割性。当猪和系统不形成任何纠缠的时候,虽然猪和系统可以构成一个更大的复合系统,但是我们仍然可以单独地描述猪、单独地描述系统,复合系统的性质仅仅是猪和系统性质的加和。但是我们知道,一旦形成了纠缠态,系统和猪就成了一个不可分割的整体。我们没有办法脱离猪的状态谈论系统本身的状态。而系统的所有信息,就和猪的信息纠缠不清了。此时,(猪+系统)的复合系统性质就不再是(猪的性质+系统的性质)了。
这个时候,猪和系统共同构成一个完整的量子态(纯态)。而单独的系统和单独的猪,就都不能构成一个完整的纯态了。当我们谈论“系统”的时候,我们实际上是把系统和猪纠缠的那部分信息抛弃掉了。抛弃的结果,就是系统从叠加态变成了若干本征态的混合 - 从“and”变成了“or”。
用一个不太严谨的话来说,薛定谔方程的幺正性意味着整个观察过程中的信息守恒。(猪+系统)作为一个纯态,整个过程中信息量保持不变。那么猪获得的信息,并不是在观察过程从猪这里额外产生的,而是在观察过程中,原本系统的独有信息“扩散”成为(系统+猪)的复合系统中的广域信息。此时刨除猪单独观察系统,就意味着刨除了这部分纠缠信息。这部分系统的丢失,就使得叠加态的丢失。
比如说,一只这样的“仪表猪”对一个双缝干涉进行了观察。我们假定,该猪有着一个双态的记忆状态分别对应着光子的两个路径(我们可以把它想象成为一个可以偏左和偏右的量子指针) – 我们用L和R表示。当它完成一次观察时,如果光子从左缝经过,那么猪的状态变为L,反之则变为R:
这里,我们用密度矩阵来表示整个复合系统(光子+猪)的状态:
这是一个纯态,其中, 分别表示L和R;
此时,如果我们想要观察光子,我们需要trace out 猪(用大白话说,就是把猪的信息抛弃掉,伴随着这种抛弃,共有信息也就一起被抛弃掉了),得到光子的信息,用光子的约化密度矩阵就是这样的:
我们可以看到,光子的密度矩阵中,表征干涉的非对角元素全部正比于
如果说,猪的两个记忆状态 - L、R - 之间能够完美可辨:
此时根据我们前面的讨论,是一个完美观察,相应地我们看到,约化密度矩阵的非对角元全部消失了,即干涉消失了。 反之,如果L、R完全重合:
此时根据我们前面的讨论,是一个无效观察,光子的密度矩阵就完全不受猪的影响,它的干涉就被完全保留下来了。 当介于两者之间的时候,这就是一个不完美测量
此时,是一个不完美的部分观察,我们可以看到,光子的密度矩阵中,非对角元素都被削弱但是仍然存在。也就是说,干涉仍然存在,但是被弱化了。
请注意,这里所说的干涉消失、弱化、或保留,指的是干涉在光子的位置自由度中消失、弱化、或保留 – 当我们忽略猪,只观察光子的时候,我们看到的情况。但是无论我们能否看到干涉,在光子+猪的复合系统中,干涉仍然存在 – 因为很显然,复合系统密度矩阵中,所有的非对角元都存在。只不过干涉存在与光子和仪器的所有自由度之间的张量积所组成的configuration space中,我们不一定能够观察到可见结果。
请注意一点,上面的一切讨论,虽然我们用到了“猪”、“观察”、“认知”等措辞,其实这些措辞都不必与意识有关。我们完全可以用“仪表”、“相互作用”、“指针指示”这样的措辞来替代它们。结果没有任何变化。
也就是说,干涉的消失与猪是否有意识无关,这里的猪,完全是一只行尸走肉的“工具猪”。
当该工具猪做一个完美观察时,我们就不能得到干涉了。
当该工具猪做一个不完美观察时,我们将会得到一个弱化的干涉。
当该工具猪做一个无效观察时,干涉就被完全保留下来了。
我们可以考虑这样一个问题,猪有意识和无意识,区别是什么?
在我们看来,并没有任何的区别。但是在猪看来,区别就在于,猪是否“意识到”观察结果。也就是说,既然猪和系统的共同演化最终形成一个共同的叠加态:
那么如果猪有意识,那么猪会认知到何种结果?它会不会意识到一个“叠加态”呢?这就是魏格纳朋友思想实验的核心问题。
答案是,不会。
因为猪本身也不是一个孤立系统。猪无时无刻不在与外界环境纠缠着 - 它需要呼吸啊。猪和系统的演化一直是在环境的“监控”下完成的,最终会进入一个与无数环境自由度纠缠在一起的整体状态。猪的认知也需要trace out 环境的 - 也就是抛弃系统与环境的共有信息。
即使是我们不考虑环境,我们只考虑猪本身。猪的观察其实分了好几步才能完成:
1.系统信息进入猪的眼睛,与眼睛发生相互作用;
2.系统与眼睛进入纠缠态;
3.眼睛产生的神经脉冲与大脑相互作用,产生意识态。
最终,猪的认知不是通过对系统的观察完成的,而是“猪脑”通过对“猪眼”的观察完成的。也就是说,在上面的第1、2步之后,系统和眼睛的状态就是:
当猪脑对眼睛的信号进行“观察”的时候,需要trace out 系统:
同样,猪脑最后得到的结果就是0或1,而不是0+1. 最后,直观但不严谨地总结一句,所谓的观察者效应,就是在一个纠缠的复合系统中,提取其中一个子系统信息,导致一部分共有信息的丢失。